部分可观察环境的马尔可夫决策过程 (partially-observed Markov Decision process POMDP) 是强化学习中的一个非常具有挑战性的部分,在 Memory-Based Control With Recurrent Neural Networks 这篇论文中,作者使用了长短时记忆的循环神经网络并扩展了确定性策略梯度 (deterministic policy gradient) 与随机价值梯度 (stochastic value gradient) 两种方法分别称为 RDPG 和 RSVG(0) 来解决 POMDP 问题。
POMDP
POMDP 可以被描述为一系列环境状态 \(\mathcal{S}\) 和行为动作 \(\mathcal{A}\) ,初始状态的概略分布 \(p_0(s_0)\) ,状态转移概率 \(p(s_{t+1}|s_t,a_t)\) 和价值函数 \(r(s_t,a_t)\) 。部分可观察指的是智能体没办法直接观察到完整的状态信息 \(s_t\) ,取而代之的只能根据条件概率 \(p(o_t|s_t)\) 从 \(\mathcal{O}\) 中接受观察到的信息。因此一个智能体能获得的完整的经验回合为 \(h_t=(o_1,a_1,o_2,a_2,\cdots,a_{t-1},o_t)\)
我们的总目标很简单,就是要去学习一个策略 \(\pi(h_t)\) 来最大化衰减过的价值函数。对于随即策略来说,即最大化 \[ J=\mathbb{E}_\tau\left[ \sum_{t=1}^\infty \gamma^{t-1}r(s_t,a_t) \right] \] 其中轨迹 \(\tau=(s_1,o_1,a_1,s_2, \cdots)\) 根据概率分布 \(\pi:\ p(s_1)p(o_1|s_1)\pi(a_1|h_1)p(s_2|s_1,a_1)p(o_2|s_2)\pi(a_2|h_2)\cdots\) 产生。对于确定性策略来说,我们用确定性函数 \(a_t=\mu(h_t)\) 来代替 \(a_t\sim\pi(\cdot|h_t)\)
# Recurrent DPG
首先来看确定性策略梯度算法,我们用以 \(\theta\) 为参数的 \(\mu^\theta\) 表示确定性策略,\(Q^\mu\) 表示当前策略的行为价值函数,策略可以用如下方法来更新: \[ \frac{\partial J(\theta)}{\partial \theta}=\mathbb{E}_{s\sim \rho^\mu}\left[ \frac{\partial Q^\mu(s,a)}{\partial a}\bigg|_{a=\mu^\theta(s)} \frac{\partial \mu^\theta(s)}{\partial \theta} \right] \] 在部分可观察的情况下,最优策略还有行为价值函数都是关于之前完整经历 \(h_t\) 的函数,这是就要用到循环神经网络而不是简单的前馈网络 (feedforward networks) ,我们要将 \(\mu(s)\) 和 \(Q(s,a)\) 改写成 \(\mu(h)\) 和 \(Q(h,a)\) 的形式: \[ \frac{\partial J(\theta)}{\partial \theta}=\mathbb{E}_{\tau}\left[ \sum_t \gamma^{t-1} \frac{\partial Q^\mu(h_t,a)}{\partial a}\bigg|_{a=\mu^\theta(h_t)} \frac{\partial \mu^\theta(h_t)}{\partial \theta} \right] \] 在实际代码中,通常忽略此处的衰减值 \(\gamma^t\) 这一项,\(Q^\mu\) 会被替换为可学习的估计值 \(Q^w\) ,这也是由参数 \(w\) 构成的循环神经网络组建而来。因此,相较于直接考虑整个观察到的经历,我们可以用随时间向后传播 (backpropagation through time BPTT) 的方法来高效的训练循环神经网络。
除此之外,我们仿照 DDPG 中的方法,设置了目标网络,用参数 \(\theta'\) 和 \(w'\) 表示,并且使用软更新 (soft update) 的方法更新两个网络。具体算法如下:
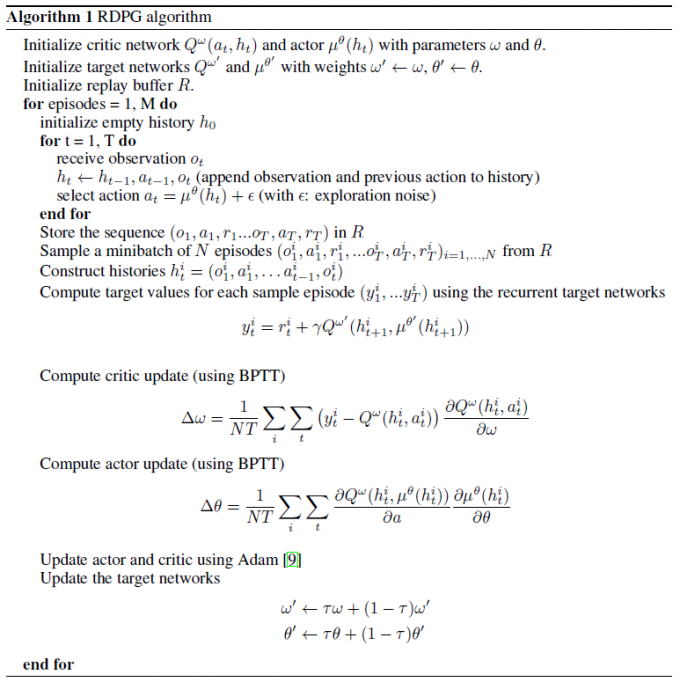
首先初始化四个网络,每次迭代过程中,先完整地记录一次经历存储到缓冲 \(R\) 中,在选择行为时在使用确定性策略算法的基础上增加一点探索的噪声。接着从缓冲中采样 N 个经历构造 \(h_t^i\) ,\(i\) 代表第 \(i\) 个 minibatch ,\(t\) 代表每个经历的第 \(t\) 个时刻。然后分别更新行为值函数 critic 和策略 actor ,最后使用软更新来更新目标神经网络。
参考
Heess, N., Hunt, J. J., Lillicrap, T. P., & Silver, D. (2015). Memory-based control with recurrent neural networks. arXiv preprint arXiv:1512.04455.

