Evolution Strategies as a Scalable Alternative to Reinforcement Learning 将 natural evolution strategies (NES) 替代深度强化学习,通过简单标量数据传递,就可以利用分布式集群的多 CPU 性能,快速扩展训练规模、快速训练智能体。
论文中介绍的 ES 属于 NES 一类的进化算法。用 \(F\) 来表示按照参数 \(\theta\) 执行的目标函数,NES 算法用参数 \(\theta\) 的分布来表示种群 (population) ,这个分布使用 \(\psi\) 来参数化,并且通过随机梯度上升来找到使平均目标价值 \(\mathbb{E}_{\theta} \sim p_{\psi} F(\theta)\) 最大化的参数 \(\psi\) 。用 REINFORCE 算法来优化可得关于 \(\psi\) 的梯度: \[ \nabla_{\psi} \mathbb{E}_{\theta \sim p_{\psi}} F(\theta)=\mathbb{E}_{\theta \sim p_{\psi}}\left\{F(\theta) \nabla_{\psi} \log p_{\psi}(\theta)\right\} \] 对于强化学习的任务,这里的 \(F(\cdot)\) 就是环境所反馈的随机回报,\(\theta\) 是随机或确定性策略 \(\pi_\theta\) 的参数。论文中一个独立的多元高斯分布来表示种群 \(p_\psi\) ,这个高斯分布由均值 \(\psi\) 和固定的协方差 \(\sigma^2I\) 来表示。这样 \(\mathbb{E}_{\theta} \sim p_{\psi} F(\theta)\) 就可以写成只与均值有关的形式: \[ \mathbb{E}_{\theta \sim p_{\psi}} F(\theta)=\mathbb{E}_{\epsilon \sim N(0, I)} F(\psi+\sigma \epsilon) \] 即 \(\theta = \psi + \sigma\epsilon\) ,那么关于 \(\theta\) 的梯度可以写为: \[ \begin{align} & \nabla_\psi \mathbb{E}_{\epsilon \sim N(0, I)} F(\psi+\sigma \epsilon) \\ =& \nabla_\psi\int_\epsilon p(\epsilon) F d\epsilon &&(F\text{ 为标量,不传梯度}) \\ =& \int_\epsilon \nabla_\epsilon p(\epsilon) \nabla_\psi\epsilon Fd\epsilon \\ =& \int_\epsilon p(\epsilon) \nabla_\epsilon \log p(\epsilon) \nabla_\psi\epsilon Fd\epsilon && (\text{REINFORCE trick})\\ =& \mathbb{E}_{\epsilon \sim N(0, I)}\nabla_\epsilon\left(-\frac{1}{2}\epsilon^T\epsilon\right) \nabla_\psi\left(\frac{\theta-\psi}{\sigma}\right)Fd\epsilon && p(\epsilon)=(2\pi)^{-\frac{n}{2}}\exp\left(-\frac{\epsilon^T\epsilon}{2}\right) \\ =& \frac{1}{\sigma} \mathbb{E}_{\epsilon \sim N(0, I)}\{F(\psi+\sigma \epsilon) \epsilon\} \end{align} \] 这样就可以直接用随机梯度上升来优化 \(\psi\)。整个算法可以总结为:
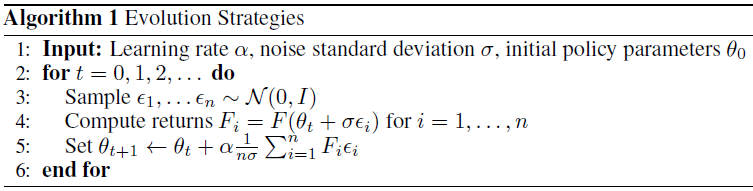
这里的均值参数用 \(\theta\) 表示。算法主要是不断重复两个过程:
- 随机扰动策略的参数,并在环境中执行一个 episode 并评估收集回报;
- 将所有的 episode 的结果收集起来,计算梯度并更新参数。
ES 的规模化与并行化
ES 方法很容易扩展到多个并行的 workers 上,因为它需要建立在完整的 episode 基础上,因此 workers 之间的通讯不频繁,同时如果每个 worker 知道其他 worker 的初始随机种子是什么,那么 workers 之间传递的信息只是一个 episode 的回报标量,非常节省带宽。
简单的并行 ES 版本如下,主要创新点是利用了已知的随机种子:
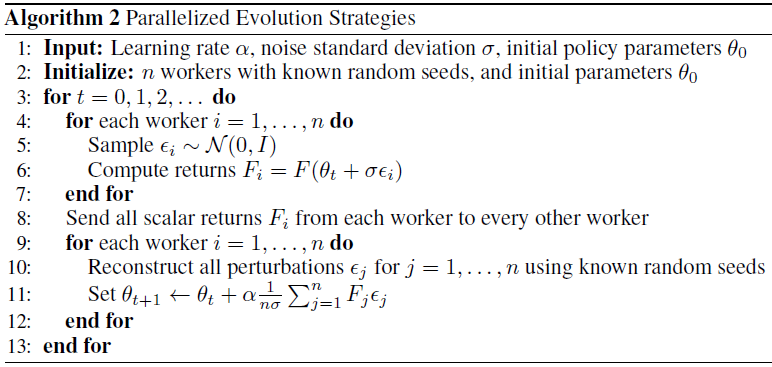
在实际中,作者会事先为每个 worker 都生成一堆大量的高斯噪音,在训练的每个迭代中随机挑选一部分噪音加到策略的参数中。尽管这样每次迭代之间的噪音扰动不是完全独立的,但作者并没有发现很大的问题。另外当使用大量的并行 workers 或神经网络结构非常大时,每次可以只扰动一部分的 \(\theta\) 。
为了减少方差,作者也使用了 autithetic sampling,也被称作 mirrored sampling,即评估扰动对 \(\epsilon, -\epsilon\) 。除此之外,算法也使用了进化学习中的 fitness shaping,给每个回报排个序,加上一个顺序权重。
Cross Entropy Method
在论文 Learning Latent Dynamics for Planning from Pixels 中,作者在基于模型的 planning 阶段也使用了一种基于种群的进化学习方法 cross entropy method (CEM) 。CEM 算法非常简单,初始化一个与时间有关的高斯分布表示最优动作序列 \(a_{t: t+H} \sim \operatorname{Normal}\left(\mu_{t: t+H}, \sigma_{t: t+H}^{2} \mathbb{I}\right)\) ,其中 \(t\) 表示当前 time step,\(H\) 是 planning 的长度。从零均值、单位方差开始,重复地采样 \(J\) 个动作序列,将他们放入到环境模型中进行评估,然后使用最佳的 \(K\) 个动作序列来更新高斯分布。在 \(I\) 次迭代过后,返回当前步的高斯的均值 \(\mu_t\) 作为动作才真正地交给环境与环境交互。收到下个观测值后,动作的高斯分布重新置为零均值、单位方差,以避免陷入局部最优。整体算法如下:
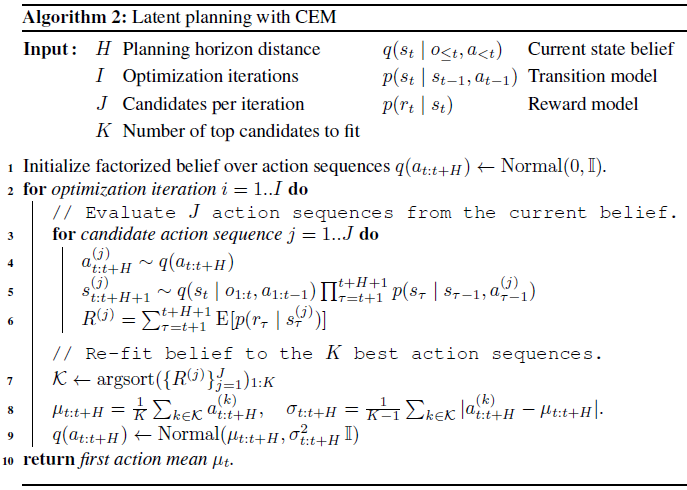
这里因为已经有了环境模型,所以可以快速地生成一个完整的 planning 序列,选取 \(K\) 个最优的序列是简单地计算每个序列的累积奖励,再进行排序。
参考
https://lilianweng.github.io/lil-log/2019/09/05/evolution-strategies.html
Salimans, T., Ho, J., Chen, X., Sidor, S., & Sutskever, I. (2017). Evolution strategies as a scalable alternative to reinforcement learning. arXiv preprint arXiv:1703.03864.

